





 دراسات وأبحاث
دراسات وأبحاث
بقلم محمد حمامي
دكتور باحث
تستعد المركبات الذاتية القيادة والقادرة على الاتصال بعضها ببعض وبمحيطها Connected and autonomous vehicles (CAVs) لإحداث ثورة في صناعة النقل التقليدية. في هذه المقالة، نقدِّم أولًا رؤية استشرافية لما سُمِّي حديثًا حوسبة المركبات في عصر القيادة الذاتية، ونُبرز أن العربات CAVs قادرة على أن تكون منصات حسابية مثالية، لذلك قد تعتمد الأجهزة/الأشياء المتصلة ذات القدرات الحسابية المحدودة على عربات CAVs المحيطة بها لأداء مهام حسابية معقدة. ونلخص ما الذي يجعل حوسبة المركبات أمرًا مفيدًا ضمن بيئة إنترنت الأشياء مع عرض بعض تطبيقات الحوسبة السيارة. وأخيرًا، ندرج عددًا من التحديات التقنية المتعلقة بالموضوع.

المركبات المتصلة والذاتية القيادة: من الحاضر إلى المستقبل
دفع التطور المتسارع في مجالَي الاتصالات والحوسبة أفق القيادة الذاتية بشكل ملحوظ، فلم تمنع العقبات التقنية والتكاليف الباهظة وعدم القبول الاجتماعي- التي لا تزال تعوق إنتاج المركبات المتصلة والذاتية القيادة (CAVs) على نطاق واسع- تسريعَ جهود البحث والتطوير في هذا المجال. إذ ينفق صانعو السيارات أكثر من 100 مليار دولار في جميع أنحاء العالم على البحث والتطوير في هذا المجال، وثمة نحو 5000 براءة اختراع تُمنح كل عام. استنادًا إلى هذا التقدم الكبير فضلًا عن التقانات التي هي في قيد التطوير، يتوقع المتفائلون أنه بحلول عام 2030، ستكون عربات CAVs موثوقة بدرجة كافية وبأسعار معقولة تجاريًّا لتحل محلَّ القيادة البشرية.

تعرض هذه المقالة نموذج استثمار مستقبلي لمركبات CAVs التي لن تقتصر وظيفتها على القيادة بكفاءة وأمان فحسب، بل من المتوقع أن تكون منصات حوسبة عالمية كاملة تدعم تطبيقات الحياة اليومية، وذلك بتوفير حوسبة مدمجة فعالة للبنى التحتية المتصلة بها.
حوسبة المركبات
يشير تعبير حوسبة المركبات إلى التقانات التي تمكِّن من إجراء عمليات حسابية ومنطقية ومعالجة للمعطيات بالاستفادة من إمكانات العربات الذاتية القيادة العتادية الصُّلبة لتكون بمثابة منصة حوسبة للعديد من الخدمات المرتبطة بهذه العربات. تختلف حوسبة المركبات عن تشبيك المركبات، الذي بدوره يُمكِّن من تنفيذ التطبيقات المتعلقة بالمركبات والنقل. أما حوسبة المركبات، فتستفيد من كون العتاد الصُّلب في عربات CAVs منصات حوسبة مثالية تساعد على تحليل المعطيات القادمة من داخل العربة ذاتها كأجهزة الاستشعار، والأهم من ذلك، من خارج السيارة أي من الأجهزة/الأشياء المتصلة بها من محيطها وكل ذلك في الزمن الحقيقي، ولو كانت المركبة في وضعية الوقوف.
وبتحديدٍ أدقّ، فإن مفهوم حوسبة المركبات مستوحى من حقيقة أن CAVs ستكون في المستقبل مجهزة بقدرات حاسوبية فائقة؛ لذلك، يمكن للأجهزة/الأشياء المتصلة ذات القدرات الحسابية المحدودة الاعتماد على عربات CAVs القريبة لأداء مهام حسابية معقدة وتقديم النتائج ذات الصلة إلى المستفيدين النهائيين.
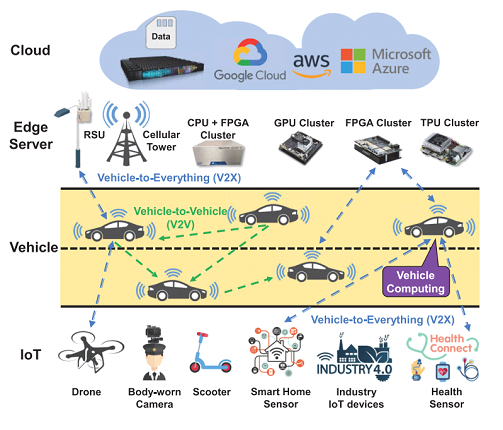
تستفيد حوسبة المركبات من أنواع الاتصالات للعربة الذاتية القيادة؛ وهي كما يبينها الشكل (1): الاتصال بين السيارة والبنية التحتية (V2I)Vehicle-to-Infrastructure ، والاتصال بين مركبة ومركبة (V2V) Vehicle-to-Vehicle، والاتصال بين المركبة وكل شيء (V2X) Vehicle-to-Everything. وتمكِّن هذه الاتصالات عربات CAVs من التواصل مع مكونات نظام المرور (مثل وحدات جانب الطريق، والأبراج الخلوية، وكَمِرات المرور، والطائرات بدون طيار، والدراجات البخارية، وحتى راكبي الدراجات أو المشاة)، إضافة إلى التواصل مع النظم الخارجية الأخرى (مثل مستشعرات المنزل الذكي، وأجهزة إنترنت الأشياء الصناعية، وأجهزة الاستشعار الصحية، والمخدمات الطرفية).
لماذا نحتاج إلى حوسبة المركبات
- الإرسال إلى السُّحب Clouds والمخدِّمات الطرفية Edge servers
تُجهَّز العربات الذاتية القيادة CAVs بأجهزة استشعار متعددة تمكّنها أن تنتج قرابة غيغابايت واحد من المعطيات في الثانية، وأكثر من 11 تيرابايت من المعطيات الحساسة للخصوصية يوميًّا، وهذه الكمية من المعطيات في ازدياد، بحيث أن سرعة نقل معطيات عنق الزجاجة تشكِّل عند إرسال هذه المعطيات إلى السحابة أو المخدمات الطرفية لتحليلها تحديًا كبيرًا لتوفير خدمات حساسة لوقت الاستجابة. وإضافة إلى ذلك، وحتى إذا ضُغطت المعطيات في CAVs قبل إرسالها، فقد تُكشف المعطيات الحساسة الأصلية، وقد يؤدي ذلك إلى تهديد محتمل بتسرب الخصوصية. لذلك، فإن قيود النطاق الترددي، واختناقات زمن الاتصال، والمخاوف المتعلقة بالخصوصية، تستدعي بدورها حوسبة المركبات التي توفر نموذج حوسبة جديدًا لوضع الحوسبة بالقرب من المعطيات. وقد أظهر العمل السابق أيضًا الفوائد المحتملة (مثل وقت الاستجابة السريع وتخفيض استهلاك الطاقة) بفضل نقل الحوسبة من السحابة إلى مصدر المعطيات.

- معالجة معطيات أجهزة إنترنت الأشياء
ستصبح جميع أنواع الأجهزة الكهربائية تقريبًا مكونات لإنترنت الأشياء، وستقوم بدور كلٍّ من منتجي المعطيات ومستهلكها، مثل الكَمِرات المثبتة على الجسم، والدراجات المتصلة بالإنترنت. ووفقًا لـ Cisco، سيكون عدد أجهزة إنترنت الأشياء في جميع أنحاء العالم زهاء500 مليار جهاز بحلول عام 2030. وسيُنتج هذه العدد الهائل من أجهزة إنترنت الأشياء كمية معطيات هائلة تصعِّب مهام تنفيذ خوارزميات التعلم العميق على أجهزة إنترنت الأشياء ذات الموارد المحدودة. ومع ذلك، فإن الاعتماد ببساطة على الحوسبة السحابية التقليدية لا يمكن أن يضمن معالجة فعالة لكل هذه المعطيات الضخمة التي تم إنشاؤها. في هذا السياق، نستنتج أن أجهزة إنترنت الأشياء ذات القدرات الحسابية المحدودة ستستفيد من عربات CAVs المحيطة والمجهزة بعتاد حاسوبي قوي لمعالجة المعطيات في الوقت المحدد.
أمثلة عملية
نعرض في هذا المقطع عددًا من الأمثلة الواعدة لاستعمال حوسبة المركبات في تقديم خدمات متقدمة.
- التوصيل إلى داخل السيارة In-Vehicle Delivery
يُعتقد أنّ انتشار عربات CAVs سيكون مكونًا رئيسيًّا من المنازل الذكية لمساعدة الناس في حياتهم اليومية. على سبيل المثال، يمكن أن توفر CAVs خدمة توصيل جديدة ومريحة وآمنة داخل السيارة عندما يكون العميل بعيدًا عن المنزل. تُعدُّ أمازون حاليًّا أكبر بائع تجزئة في العالم بواسطة الإنترنت، والخطوة التالية الواضحة هي التعاون مع صانعي السيارات الرئيسيين وإطلاق خدمات توصيل تجريبية إلى داخل السيارة. فبمجرد وصول سائق التوصيل إلى السيارة المتوقفة في مكان متاح للجمهور، يرسل السائق طلبًا لإلغاء قفل السيارة من بُعد لإجراء عملية التسليم. وبَعدَ وضع الطرود في منطقة الشحن أو في الصندوق، يرسل السائق أمرًا من بُعد لقفل السيارة، وسيتلقى العميل إعلامًا بذلك. وهكذا يمكن للزبائن استلام الطرود بأمان، حتى عندما لا يكونون في المنزل.
- اجتماع في السيارة In-Vehicle Meeting
نظرًا إلى أن الهدف النهائي للعربات الذاتية القيادة هو تحقيق تنقلٍ آمن وموثوق، فلن يكون هناك داع لوجود سائق للتركيز على القيادة. لذا من المتوقع أن تقدم عربات CAVs المستقبلية خدمات ذكية أخرى مثل توفير تجارب اجتماعات عن طريق الإنترنت تتسم بالكفاءة والسلاسة من داخل المركبات.
- الترفيه داخل السيارة In-Vehicle Entertainment
إنّ العربات الذاتية القيادة CAVs المستقبلية لديها القدرة على تغيير الطريقة التي سيسافر بها الناس، وذلك بتوفير الترفيه الصوتي والمرئي لتعزيز تجربة السفر. علمًا أنه يُتوقع أن يصل سوق الترفيه داخل السيارة إلى 30.47 مليار دولار أمريكي بحلول عام 2022. إضافة إلى ذلك، وبدءًا من عام 2023، سيتم تشغيل الملايين من سيارات Ford وLincoln بنظام التشغيل Android من Google لتزويد السائقين بتطبيقات وخدمات Google المضمَّنة. يمكن تصور أن الركاب يمكنهم اختيار مجموعة متنوعة من ألعاب الواقع الممتد Extended Reality (XR) التي توفر مراقبة للمركبة في الزمن الحقيقي، مثل تسارع السائق وتوقفه وتوجيهه لتكوّن تجربة لعب فريدة من نوعها. وإضافة إلى ذلك، وبفضل اتصال V2V، يمكن لركاب CAVs المختلفة ممارسة الألعاب داخل السيارة معًا على الطريق، وهذا مما يزيد من تنوُّع الترفيه داخل السيارة.
- الواقع المعزز داخل السيارة In-Vehicle AR
ستكون تقنيات الواقع المعزز قادرة على تحويل الزجاج الأمامي لسيارات CAVs إلى شاشات، مما سيجعل الرحلة أكثر متعة وأمانًا بفضل تقديم رسوم ملونة كاملة للركاب حول بيئتهم بزاوية رؤية واسعة. كشفت مؤخرًا شركة Civil Maps، وهي مزود برمجيات للخرائط الثلاثية الأبعاد، عن تجربة واقع معزز للركاب، والتي يمكن أن توضح للركاب كيف تنتقل عربة CAV مجهزة بشاشات AR في بيئة قيادة معقدة. كما استثمرت Alibaba 18 مليون دولار في WayRay، وهي شركة تطوير أجهزة عرض رأسية (head-up display HUD) أطلقت نظام NAVION، وهو أول نظام ملاحة ثلاثي الأبعاد للسيارة بالواقع المعزز يمكنه عرض تفاصيل السفر دون ارتداء خوذة أو نظارات الواقع المعزز في الزجاج الأمامي للسيارة المزود بتقنية AR، والذي يمكنه الاستجابة للأوامر الصوتية والحركات اليدوية.

تحديات تقنية
وصفنا في المقطع السابق أربعة تطبيقات محتملة لحوسبة المركبات. ولكن لتحقيق أهداف حوسبة المركبات، يجب الأخذ في الحسبان بعض الصعوبات التقنية التي نلخص بعضها في هذا المقطع.
- اتصالات المركبات
تشير التقديرات إلى أنه بحلول عام 2025، سيكون هناك 470 مليون عربة CAV على الطرق السريعة في جميع أنحاء العالم، مما ينتج عنه 280 بيتابايت من المعطيات. إضافة إلى ذلك، عندما تقود عربة CAV في مدينة بسرعة 40 كيلومترًا في الساعة، يجب أن يكون وقت تنفيذ كل مهمة في الزمن الحقيقي أقل من 100 ملِّي ثانية. ومع ذلك، فإن إجراء حساب فعال يعتمد على هذه الكمية الكبيرة من المعطيات يمثل تحديًا، لأنه يتطلب اتصالات فائقة الموثوقية وذات زمن انتقال منخفض لاستيعاب خدمات متعددة.
أدى الانتشار الأخير في آليات الاتصال، مثل الاتصالات القصيرة المدى المخصصة (dedicated short range communication DSRC) ، والطويلة المدى (long-term evolution LTE)، والخلوية إلى كل شيء (C-V2X cellular-vehicle2everything )، والواي فاي WiFi ، إلى تمكين CAVs من الحصول على معلومات من المركبات الأخرى والسحابات والأجهزة/الأشياء المتصلة بها، وعلى وجه الخصوص، مع عقود من تاريخ التنمية، تم نشر DSRC على نطاق واسع، ولكن لديها مشكلات مثل التغطية الصغيرة والإنتاجية المنخفضة. في المقابل، توفر WiFi وLTE مزيدًا من عرض النطاق الترددي ولكن أداءهما ضعيف في بيئة الهاتف المحمول.
وباستعمال تقنيات الاتصال المطورة حديثًا، يمكن لـ C-V2X معالجة مشكلات الاتصال بسبب سيناريوهات التنقل وكثافة المركبات. ومع ذلك، فإن C-V2X ليست مقبولة التكلفة بعد، ولا تُنشر على نطاق واسع مقارنة بـ DSRC. لذلك، لا يزال أمام تطوير آليات الاتصال طريق طويل لتقطعه.
- واجهات برمجة التطبيقات المفتوحة المصدر Open APIs
تَستعمل CAVs التطبيقات القائمة على التعلم الآلي على نطاق واسع. لكن هناك عدد محدود من المنصات العامة تدعم تحليل معطيات المركبات ومعالجتها. وباستثناء شركة Apollo التابعة لشركة Baidu، تعمل العديد من الشركات، مثل Ford و General Motors، على منصاتها المملوكة لها. إضافة إلى ذلك، وعلى الرغم من أن Apollo مفتوح المصدر، إلا أنه غير قابل للتطوير وغير مناسب لـ CAVs المستقبلية حتى الآن. هناك حاجة إلى منصات برمجية مفتوحة المصدر تقدم واجهات برمجة تطبيقات مجانية Open APIs تمكِّن من نشر وتقييم التطبيقات في البيئة الحقيقية، ويعمل باحثون على إنشاء منصة تحليلات معطيات المركبات المفتوحة OpenVDAP. ومازالت هناك حاجة إلى المزيد من واجهات برمجة التطبيقات المفتوحة لـ CAVs لدفع المطورين إلى تطوير الخدمات في هذا المجال.
- العتاد الصُّلب Computing Hardware
في الوقت الحاضر، يُصمَّم العتاد الحاسوبي الصُّلب للسيارات الخاصة بـ CAVs باستعمال وحدات معالج الرسوم (GPU)، ومصفوفات البوابات القابلة للبرمجة (FPGA)، ومعالجات الإشارات الرقمية (DSP)، والدارات المتكاملة (ASIC). ومع ذلك هناك العديد من المشكلات المفتوحة التي تنتظر معالجتها كالتكلفة المرتفعة جدًّا لهذا العتاد، والذي يقارب ثلثي ثمن العربة، ومعرفة السرعة القصوى التي يمكن أن يحققها الجهاز بقوة معالجة محدودة، وكيفية إدارة موارد العتاد الصُّلب الهجينة بكفاءة، وجدولة التطبيقات عليها.
- استهلاك الطاقة
مع وجود أجهزة الاستشعار الكثيرة والخوارزميات المعقدة المطبقة على عربات CAVs، أصبح استهلاك الطاقة مشكلة كبيرة لـ CAVs؛ إذ إنه قد يصل إلى 2000 واط ساعة. وبإجراء حساب تقريبي تبيَّن أن استهلاك الطاقة السنوي للمركبات الكهربائية على صعيد الولايات المتحدة يبلغ 180 تيرا واط ساعة. يُذكر أن مراكز معطيات Google تستعمل الآن نحو 12 تيرا واط ساعة من الكهرباء سنويًّا؛ أي إن استهلاك الطاقة للمركبات الكهربائية يساوي تقريبًا إجمالي استهلاك الطاقة لـ 15 مركز معطيات لشركات التقانة كل عام، علمًا أن معظم الطاقة يستهلكها المحرك الكهربائي للمركبة الكهربائية. لذا من الضروري تصميم البطارية ونظام إدارة الطاقة ونظام الحوسبة بشكل مشترك لتحقيق القيادة المستقلة الموفرة للطاقة.
- تبادل مهمات الحوسبة
إن الحوسبة التعاونية بين CAVs من جهة وبين والأجهزة/الأشياء المتصلة بها ليست دائمًا ممكنة، وبالنظر إلى عدم تجانس قدرات الحوسبة وترابط مهام الحوسبة يجب تحسين آلية جدولة المهام وهو ما تركِّز عليه الكثير من الأبحاث. ومع ذلك، فإنّ كل العمل يعتمد على عمليات المحاكاة، ولا يزال التقييم في سيناريوهات التطبيق الواقعي مفقودًا.
- الأمن والخصوصية
يُعنى أمان المركبات CAVs بدءًا من تجنب تلف العتاد الصُّلب التقليدي للمركبات وانتهاءً بالأمان الشامل السيبراني.
- أمن أجهزة الاستشعار
إن أمن أجهزة الاستشعار له أهمية قصوى، وبوجه عام، تُعدُّ هجمات التشويش وهجمات الانتحال هجومين رئيسيين لمختلف أجهزة الاستشعار. على سبيل المثال، ينتج عن هجوم الانتحال إشارات تداخل، يمكنها أن تجعل السيارة تلتقط عوائق وهمية.
- أمن المعطيات
يشير أمن المعطيات إلى منع تسربها من منظور النقل والتخزين، وتنتظر كيفية حماية المعطيات في الوقت الحالي وجود حلول متقدمة.
- أمن الاتصالات
يشمل أمان الاتصالات أمان الاتصالات الداخلية والخارجية. ومع أن التعمية (التشفير) هو الحل المستعمَل، إلا أن استعمالها محدود بسبب التكلفة الحسابية العالية.
- أمن التحكم
باستعمال إلكترونيات المركبات، يمكن للسائقين التحكم في سياراتهم (على سبيل المثال، فتح الباب) بواسطة التطبيقات أو الصوت. لذا من الممكن التعرض لمخاطر هجوم جديدة بأساليب متنوعة ضمن هذا السياق.
- الخصوصية
تعتمد CAVs اعتمادًا كبيرًا على المعطيات الواردة من البيئة المحيطة، وتقوم بإنشاء معطيات قيادة مخصصة تحتوي عادة على معلومات خاصة. لذا، على سبيل المثال، يمكن للمهاجم الحصول على معلومات الموقع مباشرة من معطيات GPS الملتقَطة.

المراجع
1. W. Shi, J. Cao, Q. Zhang, Y. Li, and L. Xu, “Edge computing: Vision and challenges,” IEEE Internet Things J., vol. 3, no. 5, pp. 637–646, Oct. 2016.
2. G. Karagiannis et al., “Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions,” IEEE Commun. Surv. Tut., vol. 13, no. 4, pp. 584–616, Oct–Dec. 2011.
3. S. Yi, Z. Hao, Z. Qin, and Q. Li, “Fog computing: Platform and applications,” in Proc. 3rd IEEE Workshop Hot Top. Web Syst. Technol, 2015, pp. 73–78.
4. K. Z. Ghafoor, M. Guizani, L. Kong, H. S. Maghdid, and K. F. Jasim, “Enabling efficient coexistence of DSRC and C-V2X in vehicular networks,” IEEE Wirel. Commun., vol. 27, no. 2, pp. 134–140, Apr. 2020.
5. Q. Zhang et al., “OpenVDAP: An open vehicular data analytics platform for CAVs,” in Proc. IEEE 38th Int. Conf. Distrib. Comput. Syst., 2018, pp. 1310–1320.
6. Teraki, “Autonomous cars’ big problem: The energy consumption of edge processing reduces a car’s mileage with up to 30%,” May 2019, [Online]. Available:
https://medium.com/@teraki/energy-consumption-required-by-edge-computing-reduces-a-autonomous-cars-mileage-with-up-to-30-46b6764ea1b7
7. R. Bryce, “How Google powers its ‘monopoly’ with enough electricity for entire countries,” Oct.2020, [Online]. Available https://www.forbes.com/sites/robertbryce/2020/10/21/googles-dominance-is-fueled-by-zambia-size-amounts-of-electricity/?sh=19fc3bd168c9
8. N. Eshraghi and B. Liang, “Joint offloading decision and resource allocation with uncertain task computing requirement,” in Proc. IEEE Conf. Comput. Commun, 2019, pp. 1414–1422.
9. T. X. Tran, K. Chan, and D. Pompili, “COSTA: Cost-aware service caching and task offloading assignment in mobile-edge computing,” in Proc. 16th Annu. IEEE Int. Conf. Sens., Commun., Netw., 2019, pp. 1–9.
10. L. Liu et al., “Computing systems for autonomous driving: State-of-the-art and challenges,” IEEE Internet Things J., to be published, doi: 10.1109/JIOT.2020.3043716.
 التوجهات البازغة في التعليم التحديات والآفاق
التوجهات البازغة في التعليم التحديات والآفاق  التعليم العالي وعقبات التحول الرقمي
التعليم العالي وعقبات التحول الرقمي الواقع المعزز في التعليم الهندسي: الفرص والمزايا
الواقع المعزز في التعليم الهندسي: الفرص والمزايا التعلّم الآلي والتعليم العالي
التعلّم الآلي والتعليم العالي التكنولوجيا وتعليم وتعلّم اللغة الانكليزية
التكنولوجيا وتعليم وتعلّم اللغة الانكليزية  حلول الذكاء الصنعي وأولوياته في عالم الأعمال
حلول الذكاء الصنعي وأولوياته في عالم الأعمال  الجودة في الأمن السيبراني
الجودة في الأمن السيبراني الخدمات المصغرة
الخدمات المصغرة علوم الكمبيوتر وتحديات قادمة في القرن الواحد والعشرين
علوم الكمبيوتر وتحديات قادمة في القرن الواحد والعشرين