





 دراسات وأبحاث
دراسات وأبحاثبقلم محمد خير محمد
في ظل المعطيات الراهنة التي تؤكد قرب نضوب الطاقة الأحفورية، وما يترتب على ذلك في كل مرافق المجتمعات البشرية، كان لا بد من البحث عن تقنياتٍ تَحُدُّ من تداعيات عملية التحول القادمة من الطاقة الأحفورية إلى أنواع أخرى من الطاقة المستدامة. وفي هذا السياق كان ظهور نماذج السيارات الذكية المزودة بتقنيات متقدمة أهمها تلك التي تقلِّل من استهلاك الطاقة.
يسلِّط هذا المقال الضوء على نموذجين: نموذج محاكاة التنبؤ بسرعة السيارة باستعمال الشبكات العَصَبونية الصنعية، ونموذج محاكاة متحركة للتحكم بسرعة السيارة باستعمال استراتيجية تحكم بمتحكم تناسبي. وقد تم تنفيذ المحاكاة باستعمال Matlab/Simulink.
المقدمة
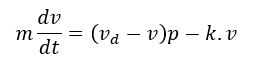
في النموذج المبسط للسيارة يمكن تحليل حركتها كما يلي: سيارة كتلتها m تتحرك بقوة دفع F وتخضع لقوة إعاقة R تتناسب طردًا مع سرعتها، كما هو مبين في الشكل 1:
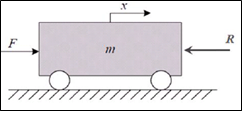
الشكل 1: نموذج مبسط لمخطط الجسم الحر لعربة متحركة
بتطبيق قانون نيوتن الثاني في الحركة الانسحابية [1]:
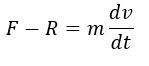
حيث:
v سرعة السيارة
R قوة الإعاقة، التي تتناسب طردًا مع السرعة؛ أي: R = k.v (k: ثابتة التناسب)
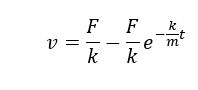
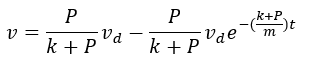
وهذا القانون هو معادلة تفاضلية خطية غير متجانسة من المرتبة الأولى والدرجة الأولى، حلُّها [2]:
وقد تم تطوير نموذجَي محاكاةٍ يعتمدان أساسًا على هذه المعادلة التفاضلية:
- النموذج الأول يمثل نموذج محاكاة للتنبؤ بسرعة السيارة باستعمال الشبكات العصبونية الصنعي. تمثل هذه المحاكاة عناصر معالجة حسابية قادرة على العمل كذاكرة محلية مع إجراء عمليات المعالجة المختلفة، أي إنها تعتمد على القيم المدخلة والقيم المخزنة في الذاكرة المحلية لهذه العناصر الحسابية. وعلى هذا تُعَدُّ الشبكةُ العصبونيةُ الصنعيةُ نظامًا قابلًا للتكيف (adaptive system)، تتغير بنيته اعتمادًا على المعلومات التي تَعبر من خلاله فيما يسمى بمرحلة التعلم. يمكن استعمال هذه الشبكات في خوارزميات تغيير وزن (أو قوة) الروابط، التي تربط الخلايا العصبونية الصنعية بعضها ببعض لإنتاج سيَّالةٍ عصبونية معيَّنة [3].
- النموذج الثاني يمثل نموذج محاكاة للتحكم بسرعة السيارة بواسطة نموذج تحكم تناسبيّ، يعتمد على مبدأ قياس الخطأ لحظيًّا بين سرعة السيارة الفعلية والسرعة المطلوبة، ويقوم بعد تضخيم الخطأ بالتحكم بمقدار إشارة الدخل المطبقة على السيارة - التي تمثل هنا قوة دفع المحرك - بحيث تؤدي العملية إلى تقليل الخطأ [4].
نموذج التنبؤ بحركة السيارة باستعمال الشبكات العصبونية الصنعية
تشبه الخليةُ العصبونية الصنعية الدماغَ البشري في قدرتها على اكتساب المعرفة بالتدريب، وتخزَّن هذه المعرفة بالاستعانة بقوى وصل داخل العصبونات تسمى الأوزان. يحتوي المخ على عشرة بلايين وحدة خلية عصبية تسمى (Neuron)، يتصل كل نيرون بآلاف من النيرونات الأخرى، وتتصل كل خلية عصبية بكثير من الألياف العصبية التي تمثل المداخل المتعددة للخلية وليفة عصبية واحدة عند المخرج [3].
وقد تم تطوير نموذج عنصر حسابي (Processing Element) مكافئ لهذا النيرون (الشكل 2)، يمثل عنصر المعالجة الذي يقوم بمحاكاة النيرون الطبيعي بتجميع الإشارات الموزونة عند المدخل، ثم مقارنة المجموع بقيمة حدية داخلية، حيث يعطي عنصر المعالجة نبضة في المخرج إذا زاد المجموع عن القيمة الحدية، ولا يعطي أي نبضة إذا كان أقل منها [3].
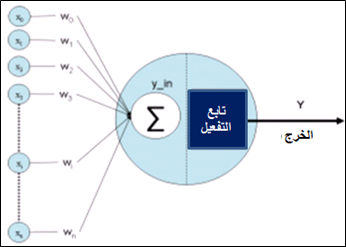
الشكل 2: النموذج الرياضي المبسط لعمل الخلية العصبية
يمثل هذا النموذج أبسط شكل لعمل العصبون، وقد جرت الاستفادة من تابع التفعيل الخطوي عند المخرج، وهو تابع قادر على تحقيق المهمة المطلوبة من الشبكة عند التعامل مع الحالات التنبُّئية البسيطة القابلة للفصل خطيًّا، أما في الحالات المعقدة، فثمة طيف واسع من توابع التفعيل التي يستفاد منها تبعًا للحالة المدروسة.
صُمِّم رمازٌ برمجي بلغة Matlab يقوم بمحاكاة النموذج الرياضي التحليلي لسرعة السيارة عند قيم عشوائية للدخل تقع ضمن مجال معيَّن، ثم تُدرَّب شبكة عصبونية - تتكون من طبقتين (الشكل 3): تتألف الطبقة الأولى من 5 عصبونات وتابع التفعيل فيها هو تابع Tansig، وتتألف الطبقة الثانية من عصبون واحد وتابع التفعيل فيها هو تابع Purelin على نصف القيم العشوائية التي طبقت على النموذج التحليلي، وذلك بالانتقال برمجيًّا بخطوة محددة اعتبارًا من بداية المجال حتى نهايته.
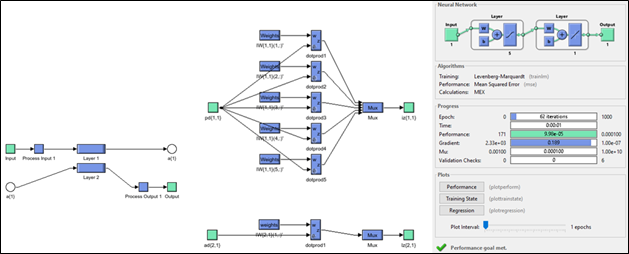
الشكل 3: تصميم الشبكة العصبونية المستعملة
ولإجراء عملية التحقق، تُقارَن مخرجات المحاكاة للشبكة العصبونية مع مخرجات المحاكاة لنموذج المخطط الصندوقي لسرعة السيارة باستعمال Simulink، الذي يمثل عملية محاكاة لحل المعادلة التفاضلية الأساسية لسرعة السيارة، كما هو مبين في الشكل 4.
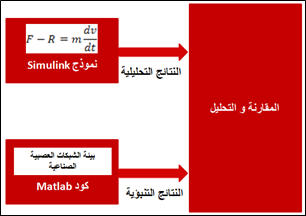
الشكل 4: عملية التحقق بين النتائج التحليلية والنتائج التنبُّئية
وقد أظهرت النتائج تقاربًا جيدًا بين القيم التحليلية والقيم التنبُّئية كما هو مبين في الجدول 1.

الجدول 1: مقارنة بين نتائج النموذج التحليلي والنموذج التنبئي باستعمال الشبكات العصبونية الصنعية
يمكن تطوير النموذج العصبوني بحيث تؤخذ عوامل أخرى في الحسبان، مما يمهد الطريق لتصميم نموذج محاكاة ذكي متطور للتنبؤ بسرعة السيارة وموضعها واستهلاكها للطاقة.
نموذج التحكم بسرعة السيارة
اعتمادًا على المعادلة التفاضلية الأساسية المبسطة لحركة السيارة، طُبِّقت خوارزمية التحكم المبينة في الشكل 5 كما يلي: يجري قياس سرعة السيارة v لحظيًّا بواسطة حساس، ثم تُقارَن بالسرعة الاسمية المطلوبة vd، حيث يمثل الفرقُ بين القيمتين الخطأَ اللحظيَّ الذي يجري تضخيمه في المتحكم بالمقدار P، ليعطي إشارة التحكم على المنظومة، وهو ما يؤدي إلى تقليل الخطأ بين السرعة الاسمية والسرعة الفعلية.
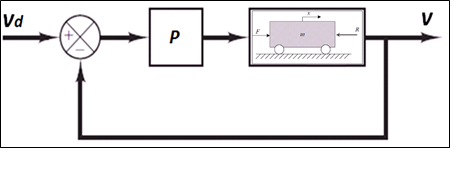
الشكل 5: المخطط الصندوقي لاستراتيجية التحكم بسرعة السيارة
بتطبيق قانون نيوتن الثاني في الحركة الانسحابية على السيارة ضمن منظومة التحكم نجد:
التي لها الحل التحليلي التالي [2]:
وهذا يعني أن:
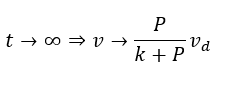
ولتقليل الخطأ أي  يجب أن يتحقق:
يجب أن يتحقق:  ، وهذا ممكن نظريًّا بدرجة تقريبية بجعل ثابتة التحكم P أكبر ما يمكن، لكن - عمليًّا - قد لا يكون ذلك قابلًا للتطبيق، وهذه نقطة مهمة يجب أخذها في الحسبان عند تطبيق استراتيجيات التحكم بهذه الطريقة.
، وهذا ممكن نظريًّا بدرجة تقريبية بجعل ثابتة التحكم P أكبر ما يمكن، لكن - عمليًّا - قد لا يكون ذلك قابلًا للتطبيق، وهذه نقطة مهمة يجب أخذها في الحسبان عند تطبيق استراتيجيات التحكم بهذه الطريقة.
صمِّم رمازٌ برمجي بلغة Matlab لمحاكاة سرعة السيارة بعد إخضاعها لاستراتيجية تحكم بمتحكم تناسبي، واعتمدت المحاكاة المصمَّمة على بيئةٍ متحركةٍ تُعالَج فيها معطيات نموذج محاكاة سرعة السيارة في دارة التحكم والمأخوذة من المخطط الصندوقي المصمَّم باستعمال Simulink، وتضمينها في متجهات للسرعة والمسافة لمجسم ثنائي البعد للسيارة، يتحرك وفق القيم اللحظية لتلك المتجهات بخطوات زمنية محددة للحصول على الدقة المطلوبة، حيث تعرض المحاكاة حركة السيارة على مسار مستقيم والسرعة اللحظية خلال المحاكاة كما في الشكل 6.

الشكل 6: عملية المحاكاة لحركة السيارة والتحكم بسرعتها
يتيح النموذج إمكان تغيير عملية تصحيح الخطأ، أي تغيير قيمةِ ثابتةِ التحكم التناسبي، وتنفيذ المحاكاة في كل مرة لتحديد التغير الحاصل مع كل تعديل.
المراجع:
- Boles Fawzy, Mariam. (2019). 4 DYNAMICS: FORCE AND NEWTON'S LAWS OF MOTION.
- Coddington, E.A., & Levinson, N. (1955). Theory of Ordinary Differential Equations.
- Demuth, H. B., Beale, M. H., & MathWorks, Inc. (2001). Neural network toolbox for use with MATLAB: User's guide. Natick, Mass: MathWorks.
- Volosencu, Constantin & Du, Xian & saghafinia, Ali. (2020). Control Theory in Engineering.
يشار إلى أنً النماذج المعتمَدة في هذا المقال صُمِّمت في نادي النمذجة والمحاكاة في الجمعية العلمية السورية للمعلوماتية - فرع اللاذقية، وقد عُرضت في معرض مشاريع نادي النمذجة والمحاكاة للفئات العمرية الصغيرة الذي أقامته الجمعية في وقت سابق من العام الماضي.
 السيارات الهجينة
السيارات الهجينة السيارات ذاتية الحركة
السيارات ذاتية الحركة كيف يمكن أن يسهم الذكاء الصنعي في تطوير السيارات الذاتية القيادة
كيف يمكن أن يسهم الذكاء الصنعي في تطوير السيارات الذاتية القيادة أتمتة المركبات
أتمتة المركبات التطبيقات المساعدة في إدارة موارد المؤسسة
التطبيقات المساعدة في إدارة موارد المؤسسة وحدة التحكم والكمبيوتر في السيارة
وحدة التحكم والكمبيوتر في السيارة