





 دراسات وأبحاث
دراسات وأبحاث
بقلم عمار كاظم
مهندس معلوماتية
المقدمة
يعد تطوير السيارات الذاتية القيادة من أهم التطبيقات في عالم الذكاء الصنعي والتعلّم الآلي. في عام 2020 قامت العديد من شركات السيارات (مثل Waymo) بتطوير سيارة أجرة ذاتية القيادة، ثم أطلقت شركة AutoX التابعة لشركة Alibaba أسطولًا من السيارات المؤتمتة بالكامل تُقاد بدون سائقين؛ فالذكاء الصنعي في هذه السيارات يقوم بمهمة السائق اعتمادًا على تحليل المعطيات التي تُحصَّل من أجهزة الاستشعار في محيط السيارة الذاتية القيادة.
كيف تتخذ السيارات الذاتية القيادة قراراتها
يمكن للسيارات الذاتية القيادة تحديد الأشياء وتفسير الصور واتخاذ القرارات بناءً على خوارزميات الكشف والتصنيف؛ حيث تعمل هذه الخوارزميات على اكتشاف الأهداف في محيط السيارة وتصنيفها وتفسير ماهيتها. وتساعد خوارزميات التعلم الآلي على اتخاذ القرارات الصحيحة عند التنقل على الطرق.

وكذلك تسهم خوارزميات التعلم الآلي في تقليل أخطاء التقدير وزيادة السلامة؛ حيث تقوم هذه الخوارزميات بتفسير الإشارات الطرقية، وتحديد الطرق المتاحة، وتعرُّف التقاطعات المرورية.
كيف ترى السيارة الذاتية القيادة؟
تَستعمل السياراتُ الذاتية القيادة ثلاثةَ أجهزة استشعار رئيسية تمثّل معًا عين السيارة وعقلها. تمكِّن هذه الأجهزةُ (وهي: كَمِرات، ورادار، وقائس مسافات ضوئي Light Detection And Ranging (lidar) السيارةَ من الرؤية الواضحة لمحيطها، وتساعدها على تحديد موقع وسرعة وشكل (ثلاثي الأبعاد) الأجسام القريبة منها. وإضافة إلى ذلك، يجري الآن تزويد السيارات الذاتية القيادة بوحدات قياس عطالية تقيس كلًّا من الموقع والتسارع وتتحكم فيهما.
a) الكَمِرات
تحتوي السيارات الذاتية القيادة على عدة كَمِرات مثبتة في زاويا السيارة للحصول على رؤية مثالية لمحيطها. وتمتاز بعض الكَمِرات بمجال رؤية يبلغ نحو 120 درجة، وبعضها الآخر مخصص للرؤية لمسافات بعيدة ولكن ضمن مجال زاويٍّ أضيق. وثمة نوع آخر من الكَمِرات تسمى (كَمِرات عين السمكة) تعطي صورًا تُساعد في وقوف السيارات.
b) الرادار
تساعد أجهزة الكشف الراداري التي تزوَّد بها السيارات (وهي مستشعرات الكَمِرات وخصوصًا في الليل أو عندما تكون الرؤية ضعيفة)، على استكشاف الأجسام المحيطة بالسيارة، حيث ترسل نبضات راديوية ترتد من هذه الأجسام وتساعد على تحديد مواقع هذه الأجسام وسرعتها بالنسبة إلى السيارة.
c) قائس المسافة الضوئي LiDAR (Light Detection And Ranging)
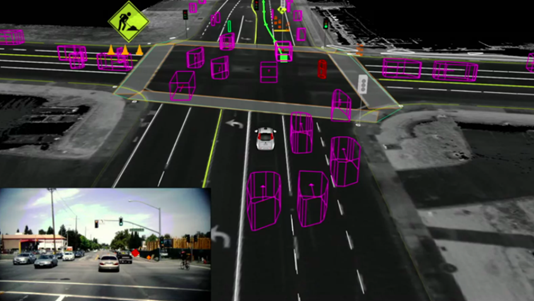
يُعدّ هذا القائس من أهم الحساسات المستعملة في تطوير المركبات الذاتية القيادة؛ وهو جهاز يرسِل نبضاتٍ ضوئيةً ترتد عن الجسم المحيط وتعود إلى هذا الجهاز، فتمكِّنه من تحديد المسافة بين هذا الجسم والسيارة، وتكوين خريطة رقمية ثلاثية الأبعاد للأجسام المحيطة بالسيارة.
لقد أثار استعمال هذا القائس جدلًا واسعًا في عالم تطوير السيارات الذاتية القيادة بين شركة تسلا Tesla وغيرها من شركات السيارات؛ فقد تجنَّبت شركة تسلا استعمالَه لأنه ينتقص من جمال مظهر السيارة بسبب حجمه الكبير وطريقة تثبيته على سطح السيارة، واستعاضت عنه نظامًا من الكَمِرات يسمَّى Hydranet، وهو شبكة من ثماني كَمِرات موزعة في أنحاء السيارة وتقوم خوارزميات الذكاء الصنعي AI بتركيب جميع الصور التي تلتقطها هذه الكمرات، بحيث تمكِّن السيارةَ من رؤية طريقها وتعرُّف محيطها.
تحليل المعطيات الخاصة بالسيارات باستعمال الذكاء الصنعي
1. المقدمة
تحدثنا في الفقرة السابقة عن بعض الحساسات التي ترى بها المركباتُ محيطَها، ولكن كيف تتمكن هذه المركبات من تعرُّف الأجسام المحيطة بها؛ مثل اللوحات الطرقية والسيارات العابرة والأجسام التي قد تواجهها على الطريق؟ هذا هو المجال الذي يؤدي فيه نظام الذكاء الصنعي دورًا مهمًّا في شرح وتفسير المعطيات التي يستقبلها. حيث يمكِّن هذا النظام السيارةَ من تحديد مواقع جميع الأجسام الموجودة في محيطها بدقة، ومن اتخاذ الإجراءات اللازمة لذلك.
يُعدّ تفسير المعطيات تفسيرًا دقيقًا من الأمور المهمة جدًّا، لأنه سيحدِّد في نهاية المطاف قدرةَ السيارة على الحركة الذاتية، ويتوقف عليه تعرُّض حياة الناس للخطر، في الوقت الذي كان فيه أحد الأهداف الرئيسية للسيارات الذاتية القيادة هو زيادة السلامة والأمان، لأن 94٪ من الحوادث الخطرة هي نتيجة خطأ بشري. فالهدف هنا هو تقليل خطأ العامل البشري في القيادة وجعل السيارة دقيقة وآمنة قدر الإمكان.
2. نوع التعلم الآلي المستعمَل في السيارات
يقسم التعلُّم الآلي إلى قسمين: تعلُّم خاضع للإشراف، وغير خاضع للإشراف.
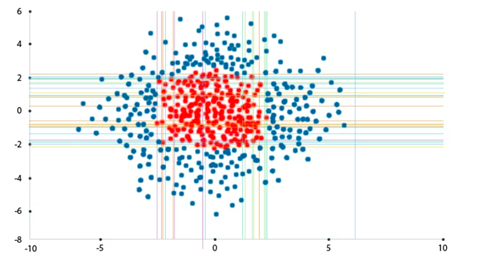
في التعلُّم غير الخاضع للإشراف، تتلقى خوارزمية التعلم الآلي معطيات غير مسماة، وليس ثمة تعليمات تتعلق بكيفية معالجتها، لذلك يتعين عليها معرفة ما يجب القيام به بمفردها. يُسهم التعلّم غير الخاضع للإشراف في اكتشاف الأنماط المخفية في المعطيات.
أما في التعلم الخاضع للإشراف، فيجري فيه تقديم أمثلة المدخلات والمخرجات المطلوبة إلى الحاسوب، بغية معرفةِ قاعدةٍ لتفسير هذه المعطيات. وهذا هو النهج المفضَّل لتعلُّم السيارات الذاتية القيادة؛ حيث تقوم الخوارزمية بتقييم معطيات التدريب بناءً على مجموعة معطيات مصنَّفة بالكامل، مما يجعل التعلم الخاضع للإشراف أكثر فائدة عندما يتعلق الأمر بالتصنيف.
3. خوارزميات التعلم الآلي المستعملة في السيارات الذاتية القيادة
• خوارزمية SIFT (scale-invariant feature transform)، مهمتها استكشاف الأجسام وتفسير الصور.
• خوارزمية AdaBoost لتصنيف المعطيات؛ تجمع المعطيات وتصنِّفها لتعزيز عملية التعلّم وأداء المركبات. وتقوم بجمع السمات المختلفة المنخفضة الأداء للحصول على سمة واحدة عالية الأداء، حيث تُستعمل هذه السمة (الصفة) لتحسين القرارات المتخذة.
• خوارزمية تعرُّف الأشياء TextonBoost: تؤدي عملًا مماثلًا لـ AdaBoost؛ فهي تستقبل معلومات عن الشكل والمظهر لتزيد فعاليةَ أداء التعلُّم باستعمال textons (تقسيمات في الصور)، ثم تُجمِّع هذه الأجزاء حسب سماتها المشتركة.
• خوارزمية المخطط البياني للتدرجات الموجَّهة (Histogram of oriented gradients HOG)، يسهم هذا المخطط في تحديد موقع الجسم، ويساعد على معرفة كيفية تغير شكله أو موضعه.
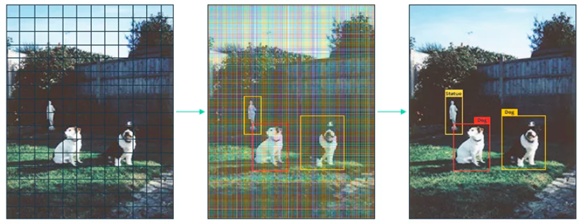
• خوارزمية انظر مرة واحدة فقط YOLO (You Only Look Once)، مهمتها استكشاف الأشياء المحيطة (كالبشر والأشجار والمركبات) وتجميعها وتعرُّفها، وذلك بتعيين سمات محددة لكل فئة منها. تُعدّ هذه الخوارزمية أفضل خوارزميات تحديد الكائنات وتجميعها.
الخاتمة
بدأت تظهر السيارات الذاتية القيادة بفضل خوارزميات التعلم الآلي؛ فقد تمكَّنت هذه الخوارزميات - بعد جمع المعطيات من محيطها من الكَمِرات وأجهزة الاستشعار الأخرى - من تفسير هذه المعطيات، ومن ثَم ساعدت السيارةَ على تحديد الأفعال الواجب اتخاذها.
لقد جعل التعلمُ الآلي القيادةَ الذاتية للسيارات دقيقةً إلى حدِّ أنها صارت تشبه (وأحيانًا أفضل) من قيادة البشر، بل استطاعت خوارزمياته تتبُّع حركات عين السائق لتحديد حالته وتنبيهه. فعلى سبيل المثال، يمكنها اكتشاف حالة السائق: هل هو نعسان، أو مخمور...؟
كلُّ ذلك يدفعنا للاعتقاد بأن مستقبل النقل هو السيارات الذاتية القيادة باستعمال خوارزميات التعلم الآلي.
 السيارات الهجينة
السيارات الهجينة السيارات ذاتية الحركة
السيارات ذاتية الحركة نمذجة ومحاكاة حركة السيارات والتحكم فيها باستعمال Matlab/Simulink
نمذجة ومحاكاة حركة السيارات والتحكم فيها باستعمال Matlab/Simulink أتمتة المركبات
أتمتة المركبات التطبيقات المساعدة في إدارة موارد المؤسسة
التطبيقات المساعدة في إدارة موارد المؤسسة وحدة التحكم والكمبيوتر في السيارة
وحدة التحكم والكمبيوتر في السيارة