







بقلم علي كاظم
باحث ومدرّس في المعهد العالي للعلوم التطبيقية والتكنولوجيا
لمحة تاريخية
وجد الإنسان نفسه مضطرًّا إلى تحديد موقعه على سطح الأرض، فعرَّف جملةَ إحداثياتٍ أرضية، تعتمد على خطوط الطول وخطوط العرض، وذلك لأنه يمكن تحديدُ موقعِ أي نقطة سطح الكرة الأرضية عن طريق إحداثيين: طولي وعرضي. أما الإحداثي العرضي، فهو ما يُعْرف باسم زاوية خط العرض (Latitude)، وأما الإحداثي الطولي، فهو ما يُعْرف باسم زاوية خط الطول (Longitude). وبهذا يجري تحديد موقع أي نقطة على سطح الأرض كما يبين الشكل الآتي:
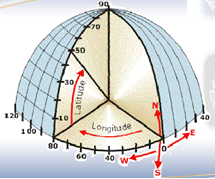
الشكل 1 جملة الإحداثيات الأرضية
حصلت محاولات متعددة لاعتماد آلية لتحديد إحداثيات جسم ما، لعلَّ أشهرها تلك التي اعتمد عليها غاليلو 1602، حيث تمكَّن من تحديد موقعه عن طريق النجوم، اعتمادًا على نظارته الفلكية والتثليث بثلاثة نجوم يمكن مراقبتها بنظارته.
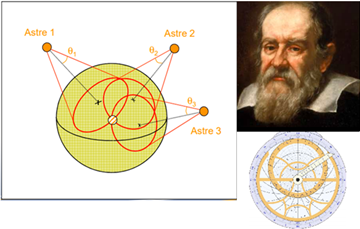
الشكل 2 تجربة غاليليو في تحديد المواقع الأرضية
وقد تمكَّن يومها من تحديدٍ تقريبي للموقع بخطأٍ مقداره عدة كيلومترات.
وفي أوائل الأربعينيات من القرن التاسع عشر، صُمِّمت نظم عالمية لتحديد المواقع تعتمد على نظم الملاحة الراديوية الأرضية؛ مثل: نظام لوران الملاحي، ونظام ديكا نافيجيتور الذي استُعمل في الحرب العالمية الثانية.
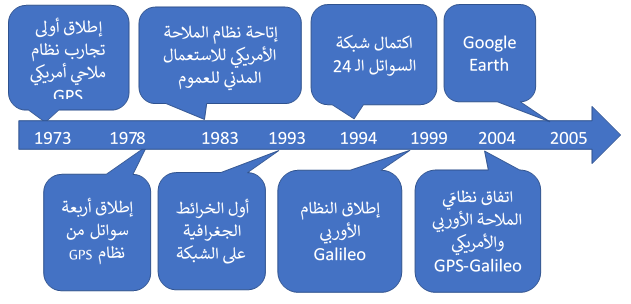
واستمرت المحاولات إلى سبعينيات القرن التاسع عشر، فاعتُمدت نظم الملاحة الفضائية وبدأ بناءُ مستقبلاتٍ لإشاراتٍ تبثها شبكةٌ من السواتل satellites، وباستقبال هذه الإشارات يجري تقدير موقع المستقبِل. فكان الظهور الأول للنظام الملاحي الأمريكي، نظام تحديد المواقع العالمي Global positioning system في عام 1973 ثم نظام الملاحة الأوربي Galileo في عام 1999، كما يبين الشكل 3
|
الشكل 3 تطور أنظمة الملاحة وتطبيقاتها |
التعريف بنظام تحديد المواقع العالمي Global Position System (GPS)

|
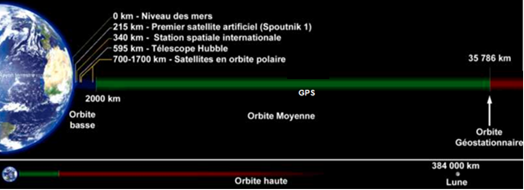
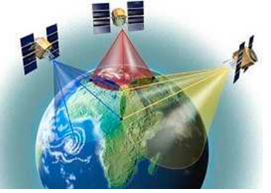
الشكل 4 توزع شبكة لسواتل GPS حول الأرض |
نظامُ تحديد المواقع العالمي هو نظامُ ملاحةٍ لاسلكيٌّ قائمٌ على شبكةٍ من السواتل لا يقلُّ عددها عن 27 ساتلاً (24 منها في حالة عمل والأخرى احتياطية) موزعة على ستة مدارات، تميل مستوياتها بالنسبة إلى خط الاستواء بزاوية inclination قدرها 55° تقريبًا، ويفصل بعضها عن بعض بزاوية صعود right ascension (الزاوية على خط الاستواء من نقطة مرجعية إلى تقاطع المدار) قدرها 60°. ترسِل هذه السواتل إشارات ميكرويةً دقيقةً تمكِّن مستقبِلَ GPS من تحديد موقعه وسرعته بدقة عالية.
وقد وُزِّعت السواتل على مداراتها التي تبعد عن الأرض ما يقارب ,00020 km (وهي مدارات متوسطة البعد)، كما يبين الشكل التالي:
الشكل 5 المدارات حول الأرض
تستغرق دورة هذه السواتل حول الأرض 12 ساعة. وقد تمّ توزيعها بحيث يمكن لأي نقطة على سطح الأرض أن ترى وفي مختلف الظروف الجوية وفي أي وقت أربعة سواتل على الأقل. وهو الحد الأدنى لتحديد الموقع بدقة وعلى مدار الساعة ،
وحدات نظام تحديد المواقع العالمي (GPS)
يتألف نظام الـ GPS من ثلاث وحدات رئيسية؛ هي:
1. قسم الفضاء: تتألف من مجموعة االسواتل GPS Satellites التي تدور حول الأرض والتي تنقل رسائلَ التوقيت والمدى.
2. محطات التحكم الأرضية GPS Ground Controls، التي تراقِب - من الأرض - مواقعَ السواتل وتفحص حالتها. ويتعقب مسارات هذه السواتل, تتواجد محطاتُ المراقبة في: هاواي، وكواجالين، وجزيرة أسنسيون، ودييجو جارسيا، وكولورادو سبرنجز، وكولورادو، إضافة إلى محطات المراقبة التي تديرها وكالة الاستخبارات الأرضية الفضائية الوطنية National Geospatial-Intelligence Agency (NGA). ترسَل بيانات التقفِّي إلى محطة التحكم الرئيسية في قاعدة شرايفر الجوية في كولورادو سبرنجز، وبعد ذلك تتصل المحطةُ بكلِّ ساتلٍ بانتظام لتعديل تُزامنِ الساعات الذرية لهذه السواتل بدقة متناهية من مرتبة النانو ثانية، وللتأكد من سلامة المعلومات التزامنية للسواتل. فإذا لم يكن التزامن صحيحاً, تقوم المحطة بتحميل التقويمُ الفلكيُّ ephemeris الصحيحُ للساتل ليعود سليمًا مرةً أخرى ويعاودالعمل من جديد.
3. المستقبِلات Receiver: هي أجهزة الاستقبال المحمولة وغيرها التي تُفسِّر الرسائلَ التي تُبَثُّ من السواتل الصناعية، ومستقبِل نظم الملاحة هو قسم المستعمِل ويتكون من هوائي مضبوط على الترددات التي يعتمدها الساتل، ومستقبل-ومعالج، وساعة عالية الدقة (غالبًا ما تكون من هزَّاز بلَّوريّ crystal oscillator). وقد تتضمن أيضًا شاشةَ عرضٍ لإعطاء بيانات الموقع والسرعة.
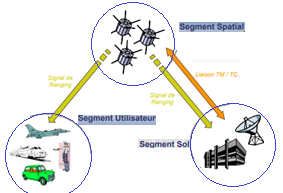
الشكل 6 الوحدات الرئيسية للـGPS
مبدأ حساب موقع الجسم
يُحسَب بُعد الساتل عن المستقبل بقياس الفرق الزمني بين وقت إطلاق الإشارة من الساتل ووقت وصولها إلى المستقبِل، ويُضاف إليها معامل تصحيح ناتج عن الانحياز بين ساعة المرسِل وساعة المستقبِل، كما تبينه المعادلة التالية:

وبمعرفة بُعد الجسم المستقبِل عن ثلاثة سواتل مرئية، يمكننا حساب موقعه من تقاطع الكرات التي قطر كل منها يساوي بُعد الساتل عن الجسم، ومركزها هو مركز الساتل.
هذا ويشترط لتحديد موقع الجسم أن تكون ساعتا الساتل والمستقبِل متزامنتين، ولمّا كانت هذه الفرضية غير صحيحة كان لابد من حساب معامل التصحيح Bhorloge لذا نحتاج إلى ساتل رابع لإتمام عملية حساب الموقع بدقة، كما يبينه الشكل التالي:
الشكل 7 مبدأ حساب الموقع حسب GPS
وبهذه الطريقة نكون قادرين على حساب المجاهيل الأربع: X: خط الطول، Y: خط العرض، الأرتفاع، الوقت.
الإشارات الملاحية
يرسِل كلُّ ساتل معطياتِ رسالةٍ ملاحية Navigation Message بسرعة 50 بت/ث، نرمز لها بـ D(t)، ترمَّز هذه المعطيات برموز مختلفة باختلاف الساتل المرسِل Csat(t)، ثم تحمَّل الرسالةُ المرمَّزة على إشارة ذات تردد معيَّن sin[w0t+∅(t)]، ولا بد من تضخيم هذه الإشارة قبل إرسالها يضربها بمعامل A. يبين الشكل مركَّبات الإشارة المرسَلة.
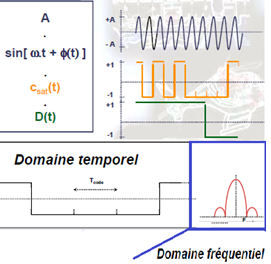
الشكل 8 الإشارة الملاحية
تفيد هذه البيانات المرسَلة من الساتل في حساب موقعه وتاريخ ووقت بث الرسالة وحالة الساتل، وتُرسَل هذه المعلومات في إطارات frames، يستغرق كلُّ منها 30 ثانية لنقْلِ 1500 بت. تحتوي الثواني الست الأولى من كلِّ إطار من المعطيات على بيانات تصف ساعةَ الساتل وعلاقتها بتوقيت النظام العام للسواتل، وتحتوي الثواني الاثنتا عشرة التالية على بيانات التقويم الفلكي، التي تشير إلى المدار الدقيق للساتل وحالته الفنية. ويجري تحديثها كل ساعتين.
أما التقويم almanac، فيحتوي على معلوماتٍ عن المدار والحالة التقريبية لكلِّ ساتل في الجملة، ونموذج إيونوسفير، ومعلومات لربط الوقت الوارد من GPS بالتوقيت العالمي المنسَّق (UTC). ويتم استلام جزء جديد من التقويم خلال السنوات 12 الأخيرة من كلِّ إطار. ويحتوي كلُّ إطارٍ على 1/25 من التقويم، لذلك يلزم 12.5 دقيقة لتلقي التقويم كاملًا من ساتل واحد فقط.
وفي الطرف المستقبِل: تصل الإشارات الراديوية إلى المستقبِل من جميع السواتل بترددات مختلفة: MHz L1 1575.42 L2 (1227.60 MHz)، ويرافقها ضجيج عند الانتقال من الساتل إلى هوائي المستقبِل. وبعد المعالجة الأولية للإشارات الواردة لتخفيف نسبة التشويه - الذي اعتراها عند قطعها هذه المسافة الطويلة من الساتل إلى المستقبِل الأرضي - ترشَّح هذه الإشارات لاختيار تلك المسماة إشارات GPS.
ينقل كل ساتل رسالته الملاحية برمزين مميزين على الأقل للطيف المنثور Distinct Spread Spectrum Codes : مرّمز االاستحواذ (C / A) (Coarse / Acquisition) ، 1023 شريحة شبه عشوائية chip pseudo-random (PRN)، وهو متاح مجانًا للجمهور ، لكل ساتل ترميز C / A خاص به بحيث يمكن التعرف عليه واستقباله بشكل فريد بشكل منفصل عن السواتل الأخرى التي ترسل على نفس التردد، والترمز الدقيق (Precise (P ، والذي عادة ما يكون معمّى ومحجوزًا للتطبيقات العسكرية.
تُنقل هذه الإشارات إلى كاشف الترميز الذي يحدِّد الساتلَ الذي وردت منه، ثم تُقرأ الرسالةُ الملاحية. وبمعرفة زمنَي إرسال الرسالة واستقبالها من عدة سواتل، تقوم خوارزمياتٌ خاصة بحساب موقع الجسم وسرعته. وبإمكان العديد من مستقبلات GPS نقلُ بيانات الموقع إلى حاسوب شخصي أو جهاز آخر وفقًا لإحدى البروتوكولات (وأشهرها بروتوكول 0183 NMEA). ويمكن للمستقبلات أن تتواصل مع الأجهزة الأخرى باستعمال وصلة تتابعية serial connection، أو USB، أو بلوتوث، كما هو مبين في الشكل التالي:
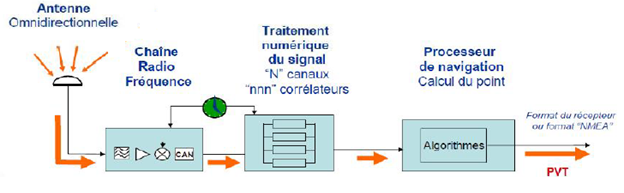
الشكل 9 جملة الاستقبال في مستقبلات الـGPS
دقة تقدير الموقع باستعمال إشارات الـ GPS
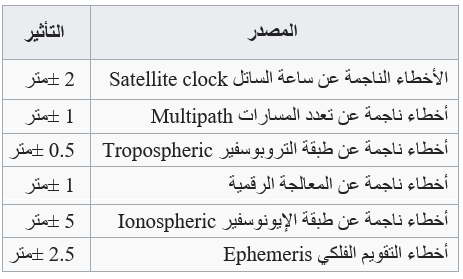
كأي إشارة راديوية مرسلة، تتعرض إشاراتُ GPS إلى ضجيج وتشويه يؤثران في جودة الكشف والتقدير لدى المستقبِل، ويؤديان إلى تراكم الأخطاء في حساب موقع الجسم. يعرض الجدول الآتي مصادر الخطأ ورتبته:
تختلف هذه الأخطاء طبعاّ بحسب عدد السواتل المستعملة في تحديد الموقع، إلى نسبة حجب التضاريس للسواتل، إلى حالة تأين الجو في طبقة الإينوسفير خلال لحظات القياس، وغيرها العديد من العوامل وشروط العمل.
وبظروف مثالية يمكن تقدير المسافة الأفقية بخطأ لا يتجاوز 50 سم، في حين قد يصل الخطأ بتقدير االارتفاع إلى (1.5 )متر، وتزداد هذه القيم كثيراً عند تناقص عدد السواتل المتوفرة للمراقِب، إلى أن يصبح حساب الموقع غير ممكناً عندما يصبح عدد السواتل المرئية في فضاء المستقبِل أقل من أربع سواتل، وفي هذه الحال نقول أننا في حالة حجب لإشارة السواتل الملاحية، وهو ما يحصل غالباً في الغابات وعند الظروف الجوية القاسية أو الحجب المتعمد أو التشويش أو غيرها. وهو الأمر الذي يجعل المستقيِل أما تحدٍ فعلي. لنتخيّل متجوّلاً في غابة، و تتوقف إشارات الملاحة فجأة ويختفي مسار العودة عن الخريطة الإلكترونية التي يحملها، بالإضافة إلى العديد من المسائل البحثية الأخرى في هذا المجال والتي ماتزال موضع اهتمام علمي كبير.
الخاتمة
يعتمد نظام تحديد المواقع العالمي GPS، كغيره من نظم تحديد المواقع الأوربية والآسيوية، على نظام السواتل المتكامل والمخصَّص لتحديد موقعٍ معرَّفٍ بخطَي الطول والعرض والارتفاع. وقد جرى تطويره خلال عشرات السنين بجيش من الباحثين من جميع أنحاء العالم.
تتركز أهمية هذا النظام في تحديد إحداثيات النقطة على سطح الكرة الأرضية، مهما اختلفت التضاريس والبيئات، وعلى مدار الـ 24 ساعة، ويعتمد عليه الكثير من المهتمين، وتستفيد منه العديد من التقنيات في تتبع الأهداف المنتخبة من بُعد، وفي عمليات البحث والإنقاذ والتوجيه الآلي المبرمج وتقنية الملاحة الجوية والبحرية باستعمال السواتل .
ومع التطور التكنولوجي في أدوات الكشف والتقدير استطاع الإنسان تقدير موقعه ضمن الفضاء المحيط بالأرض (3D) بدقة كبيرة لا تتجاوز المتر في بعض الحالات، بعد أن كان يَقبل بدقةٍ في حدود عدة كيلومترات في تقدير موقعه.
وعلى الرغم من هذا التقدم، مازالت هناك آلاف الأبحاث حول العالم تعمل على مواضيع مرتبطة بهذا المجال كتكامل نظم الملاحة الفضائية فيما بينها، أو مع غيرها، إضافة إلى تحسين خوارزميات حساب الموقع، وتحسين أجهزة الارسال والاستقبال.
لقد أصبح نظام التموضع العالمي الدعامة الرئيسية لأنظمة النقل في جميع أنحاء العالم لما يقدمه من معلومات إرشادية لتحديد خط سير عمليات النقل الجوي والأرضي والبحري، و تسهيل ما يتم يومياً من نشاط في أعمال البنوك والمصارف وعمليات تشغيل الهواتف المحمولة وحتى عمليات السيطرة على شبكات الطاقة الكهربائية، وغيرها. يُرسل نظام التموضع العالمي GNSS إشاراته بدون مقابل وبدون قيود وليس على المستثمرين إلا استقبالها ليتمكنوا من تأدية أعمالهم على نحو يتسم بقدر أكبر من الدقة والكفاءة والسلامة والتدبير في استخدام الموارد
المراجع
[1] GLOBAL POSITIONING SYSTEM AND ITS WIDE APPLICATIONS; Francis Olawale Abulude, Akinyinka Akinnusotu and Adewale Adeyemi, Technology Department, Rufus Giwa Polytechnic, Owo, Ondo State, Nigeria
[2] Kaplan (1996). Understanding GPS: principles and applications. Edited by Elliott D. Kaplan. Boston, Artech House, c1996. 554 p
[3] Navstar (1996). Navstar GPS user equipment instruction. Public release version
[5] Global Positioning System (GPS): Definition, Principles, Errors, Applications & DGPS April 2020 CITATIONS 0 READS 9,853 2; Ershad Ali ; University of North Bengal
[4] A Review of Navigation Systems (Integration and Algorithms), Ahmed M. Hasan, Khairulmizam Samsudin, Abd Rahman Ramli, Raja Syamsul Azmir, and Salam A. Ismaeel
[5]Formation GNSS; Des solutions particulaires determinists aux applications satellitaires ; DSI
LES ENJEUX DE GALILEO 2007
 البنيان الصلب (المرسلات والمستقبلات والشبكات) وتجهيزات أنظمة الملاحة
البنيان الصلب (المرسلات والمستقبلات والشبكات) وتجهيزات أنظمة الملاحة مخاطر وأضرار خدمات ونظم تحديد المواقع
مخاطر وأضرار خدمات ونظم تحديد المواقع أنظمة الملاحة العالمية والفروق الأساسية بينها
أنظمة الملاحة العالمية والفروق الأساسية بينها نظام المعلومات الجغرافية
نظام المعلومات الجغرافية أهم تطبيقات أنظمة تحديد الموضع
أهم تطبيقات أنظمة تحديد الموضع