






بقلم ريم آل بنود
تطوير نهج جديد لتصميم المواد الكهرحرارية
نجح المعهد الوطني لعلوم المواد "NIMS" في تطوير نهج جديد لتصميم المواد الكهرحرارية، وذلك بإنشاء قاعدة معطيات لمعلمات الهيكل الإلكتروني المرتبطة بخصائص التحويل الكهرحرارية للمواد، ثم إجراء تحليل شامل لقاعدة المعطيات. ويمكن الاستفادة من هذا النهج لتطوير مواد كهرحرارية عالية الأداء.
ويعد التحويل الكهرحراري وسيلة قابلة للتطبيق للحصول على طاقة مساعدة في تحقيق اقتصاد منخفض للكربون وتزويد أجهزة إنترنت الأشياء بالكهرباء، وهي تقنية تحول رقمي رئيسية لهذه الأغراض.
والتحويل الكهرحراري ظاهرة فيزيائية معروفة منذ زمن بعيد، حيث يتم توليد الكهرباء في مادة صلبة مع تدرج درجة الحرارة فيها.
وقد بُذلت جهود مكثفة لاكتشاف مواد كهرحرارية عالية الكفاءة، فقد كان النهج التقليدي لتطوير المواد الكهرحرارية العالية الأداء هو تحليل الهياكل الإلكترونية للمواد التي تظهر تحويلًا حراريًّا عالي الكفاءة والتحقيق في الآليات المسؤولة.
وركزت هذه الدراسات حتى الآن على آليات المواد الفردية بدلًا من محاولة إيجاد القواسم المشتركة بينها، حيث اكتشفت هذه المجموعة البحثية خصائص البنية الإلكترونية الشائعة في المواد الكهرحرارية العالية الأداء ونجحت في تطوير نهج تصميم مواد متعدد الاستعمالات.
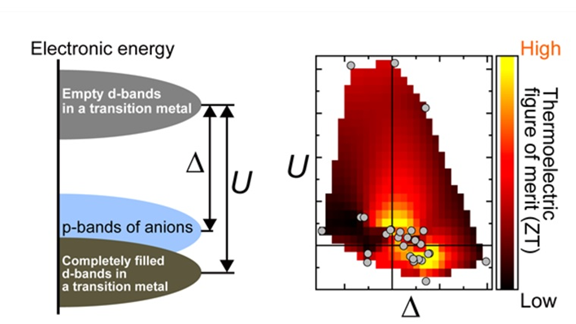
قام الباحثون أولًا ببناء قاعدة معطيات لاثنين من معلمات الهيكل الإلكتروني المعروف بأنهما مرتبطان بخصائص التحويل الكهرحراري للمواد: طاقة نقل الشحنة Δ وطاقة تنافر كولوم في الموقع "U".
جُمعت المعطيات من مواد مختلفة تحتوي على أيونات معدنية انتقالية - وهي مجموعة مواد وُجدت فيها في الماضي مواد كهرحرارية واعدة - ثم جرى تحليل العديد من المواد في وقت واحد بالاستفادة من قاعدة المعطيات، لكشفت العلاقة بين العناصر الكيميائية المختلفة والمعلمات.
طبق الباحثون هذه العلاقات على المواد الكهرحرارية واكتشفوا أن المواد ذات خصائص التحويل الكهرحرارية المرغوبة تحدث في مناطق معينة على طول قيم Δ وU المخططة.
تمثل هذه النتائج نهجًا جديدًا لتصميم مواد كهرحرارية عالية الأداء، ومن المتوقع أن تكون قاعدة المعطيات التي جرى تطويرها في هذا المشروع مفيدة في البحث عن مجموعة واسعة من المواد؛ مثل: بطاريات الليثيوم أيون، والمحفزات، والموصلات الفائقة، والمواد المغناطيسية، والمواد الموصلة للأيونات، إضافة إلى المواد الكهرحرارية.
روبوت مغناطيسي لزج يساعد على إنقاذ حياة الإنسان
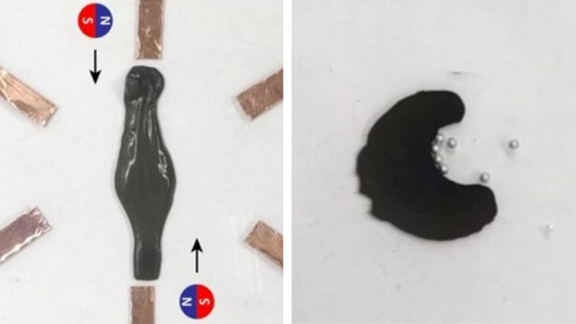
أفاد تقرير جديد نشرته صحيفة "الغارديان" أن العلماء نجحوا في ابتكار روبوت مغناطيسي لزج يمكنه أداء مهام معينة داخل جسم الإنسان مثل استرجاع الأشياء المضرة المبلوعة عن طريق الخطأ.
وهذا الروبوت هو من ابتكار البروفسور "لي تشانغ" Li Zhang من جامعة "هونغ كونغ" الصينية، ومصنوع من مزيج من بوليمر يسمى كحول البولي فينيل والبوراكس والجسيمات المغناطيسية النيوديميوم، وهي المسؤولة عن التجاذب الذي يتسبب في تحرك الروبوت، فعندما تُلمس هذه المواد بلطف وببطء فإنها تتصرف مثل السائل، ويتصرف مثل مادة صلبة عند لمسه بسرعة كبيرة؛ أي إنه يتصرف كالسائل أو المادة الصلبة بحسب مستوى القوة المطبقة.
قال العالم "تشانغ": "إنه يشبه إلى حد بعيد خلط الماء مع نشاء الذرة".
يمكن استعمال هذا الروبوت داخل جسم الإنسان خاصة داخل الجهاز الهضمي، مع ملاحظة خطر واحد، هو أن الجزيئات المغناطيسية فيه سامة، لذا فإنه يُعدُّ - في الوقت الحالي - سامًّا جدًّا إذا استُعمل داخل جسم الإنسان.
ولحلِّ هذه المشكلة، قام "تشانغ" وفريقه بتغطية الروبوت بطبقة من السيليكا، ويُتوقع أن ينتج عن هذا طبقة واقية من شأنها منع الجسيمات السامة من التفاعل مع جسم الإنسان. وخلص "تشانغ" إلى أن السلامة ستتوقف على المدة التي سيحتفظ بها داخل جسم الإنسان.
ومع أن هذا الاختراع رائع، فلا يمكنه - في الواقع - أن يخدم أي غرض حقيقي في جسم الإنسان إلا إذا تم التخلص من صفاته السامة تمامًا.
تمكِّن الروبوتات المغناطيسية المصغرة ذات الأجسام اللينة من الوصول غير الجراحي إلى الأماكن الحرجة، وتقدِّم حلولًا مثالية للجراحة الطفيفة التوغل والمعالجة الدقيقة وتوصيل الأدوية المستهدفة.
ومع ذلك فإن الروبوتات اللينة المصغرة القائمة على المطاط الصناعي "السيليكون" والسوائل "المائع الممغنط أو المعدن السائل" التي يتم تشغيلها مغناطيسيًا لها قيود.
ونظرًا إلى قابلية تشوهه المحدودة، لا يمكن للروبوت اللين الصغير الحجم القائم على المطاط الصناعي التنقل في بيئة شديدة التقييد. وفي المقابل ومع أن الروبوتات اللينة القائمة على السوائل أكثر قدرة على التكيف، إلا أنها مقيدة أيضًا بالشكل غير المستقر للسائل نفسه، ومن ثَم فهي غير متكيفة جيدًا مع البيئة.
ينفذ الروبوت اللزج وظائف مختلفة، ومن ذلك التقاط الأشياء الصلبة، وابتلاع ونقل الأشياء الضارة، ومراقبة حركة الإنسان، وتبديل الدوائر وإصلاحها.
تقترح هذه الدراسة تصميم روبوتات جديدة ذات أجسام ناعمة تعزز تطبيقاتها المستقبلية في المجالات الطبية الحيوية والإلكترونية وغيرها.
وتوجد بالفعل روبوتات مرنة قادرة على التعامل مع الكائنات وروبوتات قائمة على السوائل التي تمكنها من التنقل في الأماكن الضيقة، ولكن الروبوتات التي تجمع بين كلتا الخاصيتين أقل شيوعًا.

تسخير خوارزميات الكم للتنبؤ بتفاعل بطارية معدن الليثيوم
إذا كان من الممكن تقليل التفاعل في بطاريات الليثيوم المعدنية، فمن الممكن أيضًا أن تكون صديقة للبيئة، بحيث تستمر مدة أطول وبتكلفة إنتاج أقل من بطاريات الليثيوم أيون.
تُظهر بطاريات الليثيوم المعدنية "Li-metal" إمكانات كبيرة لتعبئة كميات أكبر من الطاقة من بطاريات الليثيوم أيون الحالية. على سبيل المثال يمكن لبطارية Li-metal الكهربائية في السيارة أن تعمل لقطع مسافات أبعد، ويمكن لبطارية هاتف Li-metal أن تعمل مدة أطول، ومع ذلك فإن السطح المعدني لبطاريات Li-metal شديد التفاعل، وهناك فهم محدود لكيمياء هذه التفاعلات.
تلجأ الدكتورة "بيرلا بالبوينا" Perla Balbuena - الأستاذة في قسم Artie McFerrin للهندسة الكيميائية بجامعة Texas A&M - إلى طرائق كيميائية كمومية لتتبع تفاعلات معيَّنة تحدث على الأسطح داخل بطاريات Li-metal، حيث سيعزز فهم تفاعلات بطارية Li-metal والتنبؤ بالمنتجات قابلية الاستعمال عن طريق تقليل تفاعلها.
نُشر هذا البحث مؤخرًا في مجلة ACS Applied Materials & Interfaces التابعة للجمعية الكيميائية الأمريكية، وشارك في تأليفه طالب الدراسات العليا "داتشنغ كواي" من قسم الكيمياء في جامعة تكساس "إيه آند إم".
قالت "بالبوينا": "نحتاج إلى فهم نوع التفاعلات التي تحدث، وكيفية إبطاء هذه التفاعلات، وما هي المكونات، وما هي مورفولوجيا المنتجات المتطورة، وكيف تتحرك الأيونات والإلكترونات على السطح. إن فهم هذه القضايا الحرجة يتيح لنا تسويق بطاريات Li-metal في المستقبل القريب".
فعندما تصنَّع بطاريات Li-metal، يتشكل غشاء رقيق على الأنود (يشار إليه عادةً بالطور البيني الصلب بالكهرباء SEI)، يتكون هذا الغشاء من مكونات متعددة وينتج عن طريق تحلل الإلكتروليت.
ويعد التركيب الكيميائي لـ SEI أمرًا بالغ الأهمية لضمان أداء أعلى للبطارية وإطالة عمرها الافتراضي. ونتيجة المحاولات التجريبية، يمكن للتنبؤات النظرية أن تكشف التفاصيل في هذه الظاهرة على المستويين الذري والإلكتروني.
في هذه الدراسة، استهدف الباحثون بوليمرًا يتطور بسبب تفاعلات الإلكتروليت على الأسطح الداخلية للبطارية. يعد تحديد تفاعل البوليمر المحدد هذا أمرًا صعبًا ولكنه ضروري لتحسين SEI.
وقام الباحثون بمحاكاة الواجهة على المستوى الذري وحلُّوا معادلات كيميائية كمية دقيقة لرسم خريطة للتطور الزمني لتفاعل تكوين البوليمر.
قالت "بالبوينا": "ما يميز هذا البحث هو البدء بوصف المستوى المجهري والسماح للنظام بالتطور وفقًا لإعادة توزيعه الإلكتروني عند التفاعل الكيميائي".
"هناك العديد من الأساليب التجريبية التي يمكن أن تتبع ردود الفعل وتراقبها، لكنها تمثل تحديًا. باستعمال هذه المحاكاة، يمكننا الحصول على رؤى جديدة، حيث نقوم بعزل الجزء المسؤول عن الأحداث الكيميائية المهمة من النظام. نحن نتبع تلك المجموعة المحددة من الجزيئات ونحلل التفاعلات التي تحدث تلقائيًّا على سطح الأقطاب الكهربائية".
في هذا البحث يمكن للأدوات الحسابية تحديد تكوينات الطاقة الدنيا وترتيب الجزيئات أثناء التفاعل، ومن ثَم رسم التفاعل من البداية إلى النهاية.
ووجد الباحثون أن الأنواع التي تتبلمر في SEI يمكن أن تكون مفيدة لبطاريات Li-metal لأنها يمكن أن تساعد على التحكم في مستوى تفاعل مواد البطارية.
قالت "بالبوينا": "نحن سعداء بالنتائج، لأنها توفر نظرة ثاقبة لما يمكن أن يحدث عند استعمال أقطاب كهربائية حقيقية".
وتوضح هذه النتائج استعمال الأدوات الحسابية التي يمكن أن تسهم في إنشاء بطاريات أكثر ملاءمة للبيئة، ولها عمر أطول وأرخص في الإنتاج.
ومع تطور كيمياء أفضل تأمل بالبوينا أن تكون مناهج بحثها مفيدة لسنوات قادمة.
وقالت: "يمكن أن يكون هذا البحث قوة دافعة للبطاريات في اتجاه أكثر اخضرارًا وفعالية. أعلم أن هذا العمل سيكون مفيدًا بعد 10 سنوات من الآن لأنه قبل 10 سنوات، قدمنا مساهماتنا الأولية في بطاريات Li-ion وساعدت نتائجنا في تطوير التقانة الناجحة اليوم، إنها دورة من التحسين المستمر".
ابتكار روبوت رباعي الأرجل يساعد علماء الآثار على التنقيب
ابتكر العلماء روبوتًا رباعي الأرجل يسمى Spot للتجول حول أنقاض مدينة بومبي القديمة، وتحديد المشكلات الهيكلية والمتعلقة بالسلامة أثناء الحفر تحت الأرض لتفقد الأنفاق التي حفرها لصوص الآثار، حيث سيساعد الروبوت علماء الآثار والسلطات بقيامه بدوريات في الموقع الذي تبلغ مساحته 66 هكتارًا بحثًا عن علامات التعرية والتلف والنهب.
الروبوت الشبيه بالكلاب هو الأحدث في سلسلة التقنيات المستعملة باعتبارها جزءًا من مشروع أوسع لإدارة الحديقة الأثرية بطريقة أفضل منذ عام 2013، عندما هددت اليونسكو إضافة "بومبي" إلى قائمة مواقع التراث العالمي المعرضة للخطر ما لم تحسِّن السلطات الإيطالية الحفاظ عليها، حيث كانت التعرية والعوامل الجوية تؤثران على أجزاء الموقع التي حفرها علماء الآثار حتى الآن.
ولحماية المدينة المدمرة والحفاظ على سلامة عمال الترميم، كانت سلطات المتنزه بحاجة إلى إيجاد طرائق جديدة لرصد الأضرار، واستعادة الهياكل القديمة، والحفاظ عليها في المستقبل.
وهنا يأتي دور Spot الكلب الآلي الأصفر اللامع وهو جزء من مشروع يسمى Smart @ POMPEI، يَستعمل أدوات عالية التقنية للمساعدة في مراقبة الموقع القديم.
الروبوت Spot هو من صناعة شركة Boston Dynamics في الولايات المتحدة، وهو قادر على فحص أصغر المساحات ويمكنه عبور التضاريس غير المستوية أثناء حمل حمولات صغيرة مثل الكَمِرات وأجهزة الاستشعار، ومثل طائرة بدون طيار يمكن للروبوت الشبيه بالكلاب أن يتبع مسارًا مبرمجًا، أو يمكن للمشغلين توجيهه بواسطة جهاز تحكم من بعد.
والهدف منه تحسين جودة مراقبة المناطق القائمة، وتعزيز المعرفة بحالة تقدم الأعمال في المناطق التي تخضع للاستعادة أو الترميم، ومن ثَم إدارة سلامة الموقع، وكذلك العمال.
ووفقًا لـ"غابرييل زوكتريجل" مدير حديقة "بومبي" الأثرية فإنه لم يتم تطوير أي تقنية من نوعها للمواقع الأثرية حتى ظهور الروبوت Spot، وإن حجم الروبوت الخفيف والرشيق الذي يبلغ وزنه 25 كيلوغرامًا وخفة الحركة يجعله مراقبًا مثاليًّا لموقع أثري مثل بومبي.
قال "زوكتريجل": "إن التقدم التقاني في عالم الروبوتات، في شكل ذكاء صنعي ونظم مستقلة، قد أنتج حلولًا وابتكارات مرتبطة عادةً بعالم الصناعة والتصنيع، ولكنها لم تجد حتى الآن تطبيقًا داخل المواقع الأثرية بسبب عدم تجانس الظروف البيئية وحجم الموقع".
سيتم اختبار Spot للاستعمال في الأنفاق تحت الأرض التي صنعها تومبارولي، أو غزاة القبور، الذين جمعوا ثروات نتيجة وصولهم إلى الأنقاض وسرقة الآثار وبيعها لتجار الفن في جميع أنحاء العالم.
قال "زوكتريجل": "غالبًا ما تكون ظروف السلامة داخل الأنفاق التي حفرها لصوص القبور محفوفة جدًّا بالمخاطر، ومن ثَم فإن استعمال الروبوت يمكن أن يشير إلى اختراق من شأنه أن يمكننا من المضي قدمًا بسرعة أكبر وبأمان تام".
وتمامًا مثل الكلاب الحقيقية المدربة على العمل في مناطق الكوارث، يمكن لـ Spot المناورة بسهولة بين الصخور والأنقاض غير المستوية، أو الانزلاق في الممرات الضيقة بين الجدران القديمة وأكوام الحطام البركاني، أو الزحف في الأنفاق المتهدمة تحت الأرض.
ولكن على عكس الكلب الفعلي، يمكن لـ Spot أن يرسم تفاصيل دقيقة عن التضاريس التي يعبرها وظروف الجدران والهياكل الأخرى المحيطة به.


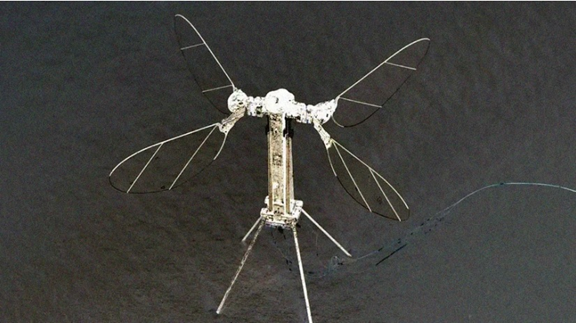
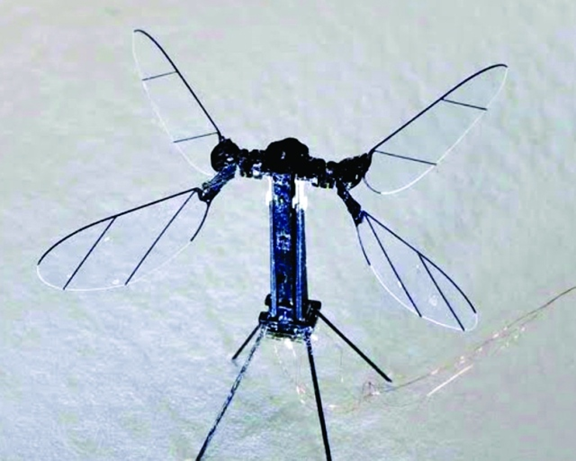
روبوتات طائرة جديدة بحجم الحشرات
طور باحثون من جامعة "بريستول" نظام قيادة جديد للروبوتات الذاتية الحركة ذات الأجنحة المرفرفة، باستعمال طريقة جديدة للضغط الكهرميكانيكي الذي يلغي الحاجة إلى المحركات والتروس التقليدية.
هذا التقدم الجديد الذي نُشر اليوم في مجلة Science Robotics، يمكن أن يمهد الطريق لروبوتات طيران صغيرة أصغر حجمًا وأخف وزنًا وأكثر فاعلية للرصد البيئي والبحث والإنقاذ والنشر في البيئات الخطرة.
حتى الآن، استعملت الروبوتات الطائرة الصغيرة النموذجية المحركات والتروس ونظم النقل المعقدة الأخرى لتحقيق حركة الأجنحة إلى الأعلى والأسفل، وقد أضاف هذا تعقيدًا ووزنًا وتأثيرات ديناميكية غير مرغوب فيها.
لكن الباحثون في كلية الهندسة في "بريستول"، نجحوا بقيادة أستاذ الروبوتات "جوناثان روسيتر" Jonathan Rossiter، في إثبات نظام عضلي صنعي مباشر، يُطلق عليه اسم Zipping Actuator (LAZA)، والذي يحقق حركة الأجنحة من دون استعمال أجزاء أو تروس دوارة.
يعمل نظام LAZA على تبسيط آلية الخفقان إلى حد بعيد، مما يتيح التصغير المستقبلي للروبوتات المرفرفة وصولًا إلى حجم الحشرات.
وبيَّن الفريق إمكان نظام LAZA تقديم رفرفة ثابتة على مدار أكثر من مليون دورة، وهو أمر مهم لصنع روبوتات ترفرف يمكنها القيام برحلات بعيدة المدى.
قال الدكتور "تيم هيلبس" Tim Helps المؤلف الرئيسي والمطور لنظام LAZA: "باستعمال LAZA، نطبق قوى إلكتروستاتيكية مباشرة على الجناح، بدلًا من نظام نقل معقد وغير فعال، وهذا يؤدي إلى أداء أفضل وتصميم أبسط وفتح فئة جديدة من المركبات الهوائية الدقيقة المنخفضة التكلفة والخفيفة الوزن للتطبيقات المستقبلية، مثل الفحص المستقل لتوربينات الرياح البحرية".
ويتوقع الفريق اعتماد LAZA حجرًا أساسيًّا لمجموعة من الروبوتات الطائرة المستقلة التي تشبه الحشرات. ويمكن استعمال هذه الطائرات بدون طيار لروبوتات البحث والإنقاذ المحتملة للعثور على ناجين في حطام الكوارث الذي لا تستطيع الطائرات الأكبر بدون طيار الوصول إليه.
كما أن لهذه الطائرات الصغيرة التي تعمل بدون طيار استعمالات محتملة أخرى، مثل التلقيح الصنعي للمحاصيل أو حمل كَمِرات صغيرة لفحص المحركات التوربينية، أو أخذ عينات من المياه، وكذلك تنفيذ وظائف كبيرة من شأنها أن تشكل خطرًا على العمال البشريين.
تطوير مكونات لخطوط الاتصال بالألياف البصرية
حقق العلماء الروس نجاحًا في تطوير مكونات خطوط الاتصال بالألياف البصرية؛ أي ما يسمى أجهزة الكشف الضوئية، اللازمة لتصل الإشارة من كبل الإنترنت إلى الجهاز.
وأشارت صحيفة "إزفيستيا" Izvestia إلى أن العلماء تمكنوا من ابتكار تقنيات ومعدات تقانية لتصنيع المكونات النشطة للدوائر الضوئية المتكاملة "PICs"، يطلق عليها أجهزة الكشف الضوئي وتؤدي وظيفة المحول.
يحمل كبل الألياف الضوئية إشارة بصرية "نبضات ضوئية" لتوصيلها بحاسوب أو أي جهاز آخر، حيث يجب تحويلها إلى جهاز كهربائي، ويتم تنفيذ هذه المهمة بواسطة المكونات المطورة في المركز في إطار مشروع الفوسفيد.
حجم جهاز الكشف الضوئي صغير بحجم سماعة الأذن، ويحتوي من جانب على موصل لكبل الألياف الضوئية، وعلى الجانب الآخر موصل كهربائي، حيث تُستقبل الإشارة وتعالَج بعد ذلك بواسطة بالحواسيب. وأوضح "إيفجيني كولوديزني" Evgeny Kolodezny - الأستاذ في الجامعة الوطنية للبحوث والمشارك في ITMO National Research - أن الهدف الرئيسي للمشروع هو تطوير تقنية محلية بالكامل لإنتاج مكونات نشطة للدوائر الضوئية المتكاملة FIS.
ويجري ضمن المشروع تطوير نوعين من وحدات جهاز الكشف الضوئي على أساس منصة InP.
وقد أُنجز التصميم الأولي لأحد أنواع أجهزة الكشف الضوئية المخصصة لنظم المراقبة البيئية، وسيُنجَز في هذا العام التصميم الأولي للتعديل الثاني للكاشف الضوئي لنظم الاتصالات السلكية واللاسلكية.
قال "أنطون زورافليف" Anton Zhuravlev مدير المشروع والأستاذ المساعد في قسم تقنية النانو وتقانة النظم الدقيقة بجامعة بيرم الحكومية الوطنية للبحوث "سيتم أيضًا صنع النماذج الأولى للأجهزة".
ابتكار أجهزة صغيرة خالية من البطاريات لحمل المستشعرات بالرياح
يمكن لأجهزة الاستشعار اللاسلكية مراقبة كيفية اختلاف درجة الحرارة أو الرطوبة أو الظروف البيئية الأخرى في مساحات شاسعة من الأرض، مثل المزارع أو الغابات، حيث توفر هذه الأدوات رؤى فريدة لمجموعة متنوعة من التطبيقات، ومن ذلك الزراعة الرقمية ومراقبة تغير المناخ.
ومع ذلك، فإن إحدى المشكلات هي أن وضع مئات أجهزة الاستشعار في منطقة كبيرة يستغرق وقتًا طويلًا ويحتاج إلى تكلفة كبيرة، وهذا ما دفع فريقًا من جامعة واشنطن لتطوير جهاز صغير لحمل المستشعرات يمكن أن تحمله الرياح نحو الأرض.
يبلغ وزن هذا الجهاز نحو 30 ضعفًا من وزن بذرة الهندباء التي يبلغ وزنها 1 مليغرام، غير أن بإمكانه الانتقال إلى مسافة تصل إلى 100 متر في نسيم معتدل، أي بطول ملعب كرة قدم.
يجري إطلاقه بواسطة طائرة بدون طيار، وبمجرد وصوله إلى الأرض يَستعمل الجهاز الذي يمكنه استيعاب أربعة أجهزة استشعار على الأقل، الألواح الشمسية لتشغيل الإلكترونيات الموجودة على متنه ويمكنه مشاركة معطيات المستشعر حتى مسافة 60 مترًا.
وقد نشر الفريق هذه النتائج في مجلة Nature حيث قال كبير المؤلفين "شيام جولاكوتا" أستاذ UW في مدرسة Paul G. Allen لعلوم وهندسة الحاسوب: "يمكنك استعمال مكونات جاهزة لإنشاء أشياء صغيرة، فنموذجنا الأولي يشير إلى أنه يمكنك استعمال طائرة بدون طيار لإطلاق آلاف من هذه الأجهزة في قطرة واحدة، ستحملها الرياح جميعًا بشكل مختلف قليلًا، ويمكنك إنشاء شبكة من 1000 جهاز بهذه القطرة الواحدة".
وهذا أمر مذهل في مجال نشر أجهزة الاستشعار، لأنه في الوقت الحالي قد يستغرق الأمر شهورًا لنشر هذا العدد الكبير من أجهزة الاستشعار يدويًّا.
ونظرًا إلى أن الأجهزة تحتوي على إلكترونيات على متنها، فمن الصعب جعل النظام بتمامه خفيفًا مثل بذور الهندباء الفعلية.
كانت الخطوةُ الأولى تطويرَ شكل يتيح للنظام وقتًا للسقوط على الأرض بحيث يمكن أن يحركه النسيم.
اختبر الباحثون 75 تصميمًا لتحديد ما الذي قد يؤدي إلى أصغر سرعة نهائية، أو السرعة القصوى للجهاز عند سقوطه في الهواء.
قال المؤلف الرئيسي "فيكرام آير" وهوأستاذ مساعد UW في مدرسة Allen: "مع زيادة الوزن، بدأت شعيراتنا تنحني للداخل فأضفنا هيكلًا دائريًا لجعله أكثر تيبسًا ويحتل مساحة أكبر للمساعدة في إبطائه".
ولإبقاء الأشياء خفيفة، استعمل الفريق الألواح الشمسية بدلًا من البطارية الثقيلة لتشغيل الإلكترونيات. ومع ذلك لا يمكن للنظام تخزين الشحن بدون بطارية، وهذا يعني أنه بعد غروب الشمس، ستتوقف أجهزة الاستشعار عن العمل، وعندما تشرق الشمس في صباح اليوم التالي سيحتاج النظام إلى القليل من الطاقة ليبدأ عمله.
قال "فيكرام آير": "يكمن التحدي في أن معظم الرقائق ستستمد قدرًا أكبر من الطاقة لمدة قصيرة عند تشغيلها أول مرة، وأن كل شيء يعمل بشكل صحيح قبل تنفيذ الكود الذي كتبته. يحدث هذا عندما تقوم بتشغيل هاتفك أو حاسوبك المحمول".
صمم الفريق الأجهزة الإلكترونية لتشمل مكثفًا، وهو جهاز يمكنه تخزين بعض الشحنات بين عشية وضحاها. ولدينا هذه الدائرة الصغيرة التي تقيس كمية الطاقة التي قمنا بتخزينها، وبمجرد أن تشرق الشمس ويتدفق المزيد من الطاقة، ستعمل على تشغيل باقي النظام.
تَستعمل هذه الأجهزة التشتت الخلفي، وهي طريقة تتضمن إرسال المعلومات عن طريق عكس الإشارات المرسلة، لإرسال معطيات المستشعر لاسلكيًّا إلى الباحثين.
الأجهزة التي تحمل أجهزة استشعار تقيس درجة الحرارة والرطوبة والضغط والضوء وترسل المعطيات حتى غروب الشمس عند إيقاف تشغيلها، وتستأنف جمع المعطيات عندما تشغِّل الأجهزة نفسها في صباح اليوم التالي.
ولقياس المسافة التي ستقطعها الأجهزة في مهب الريح، ألقى الباحثون بها من ارتفاعات مختلفة، إما باليد أو بالطائرة بدون طيار في الحرم الجامعي.
وقال الباحثون إن إحدى الحيل لنشر الأجهزة من نقطة قطرة واحدة هي تغيير أشكالها قليلًا بحيث يتم حملها بواسطة النسيم بشكل مختلف.
قال المؤلف المشارك "توماس دانيال" أستاذ علم الأحياء بجامعة واشنطن: "هذا يحاكي علم الأحياء، حيث يكون التباين في الواقع ميزة، وليس خطأ، لا يمكن للنباتات أن تضمن أن المكان الذي نشأت فيه هذا العام سيكون جيدًا العام المقبل، لذلك توجد بعض البذور التي يمكنها السفر بعيدًا".
فائدة أخرى للنظام الخالي من البطاريات هي أنه لا يوجد شيء على هذا الجهاز سينفد من الطاقة، وسيستمر الجهاز في العمل حتى ينهار جسديًا.

أول روبوت تصوير بالموجات فوق الصوتية في العالم
تمكن باحثون في معهد موسكو للطيران من تطوير نظام تحكم برمجي للروبوتات RoboScan لإجراء فحوص مستقلة دقيقة بالموجات فوق الصوتية للمرضى، تشمل الأجهزة الإلكترونية والبرامج الخاصة بها.
فقد أفاد المكتب الصحفي للمعهد أن نموذجًا أوليًّا لروبوت RoboScan جاهز للاختبارلتقليل العبء على الأطباء والحصول على أفضل الصور الممكنة لإجراء التشخيص.
ويتوقع العلماء مستقبلًا إجراء الفحص بالموجات فوق الصوتية بواسطة روبوت، على غرار التصوير المقطعي أو التصوير بالرنين المغناطيسي، أما حاليًّا فيقوم المتخصصون باختبار خوارزميات الفحص الآلية بالموجات فوق الصوتية على حوض الإنسان، وكذلك الذراعين والساقين.
وأوضح المكتب الصحفي للمعهد أن الروبوت هو يد آلية مزودة بجهاز استشعار بالموجات فوق الصوتية يحل محل راحة اليد، وتتمثل المهمة الرئيسية للروبوت في فصل عمليات DICOM عن تحليلها بواسطة متخصص، مما يحسن جودة التشخيص ويقلل العبء على الأطباء المؤهلين.
وبمساعدة الروبوت يمكن بناء قاعدة المعطيات من مجموعة من صور DICOM أو نماذج ثلاثية الأبعاد للأعضاء البشرية. لذلك يمكن لهذه المجموعة من المعلومات أن تشكل الأساس للتغييرات في مجال الموجات فوق الصوتية، على سبيل المثال المساعدة في إدخال الذكاء الصنعي.
